EVU XXV 2016 – 19 Basics and Features of Vehicle Dynamics
Basics and Features of Vehicle Dynamics
Lugner P.
Institute of Mechanics and Mechatronics, TU Vienna
Abstract
Starting with plane vehicle models the main characteristics of over – understeer, stability, driving and
breaking are explained. More complex car models with 3D car body movement and complex tyre modelling allow the insight into the friction behaviour of each single wheel and the nonlinear system behaviour. 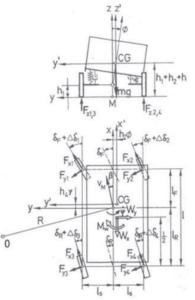 A „Reality Model” will be composed of complex nonlinear substructures and for the calculation of
A „Reality Model” will be composed of complex nonlinear substructures and for the calculation of
the system behaviour, including information of internal effects, multi-body-system software like SIMPACK but also PC-Crash are applied. Such models, providing near reality system behaviour are used
for vehicle development, tuning of control systems and in the area of accident reconstruction for nonlinear pre- or after crash simulation.
La lettura di questo articolo è riservata ai soli Soci EVU Italia
| Autore | Lugner P. Institute of Mechanics and Mechatronics, TU Vienna |
| Pubblicato il | |
| Tipologia |